Temps de lecture : 2 minutes
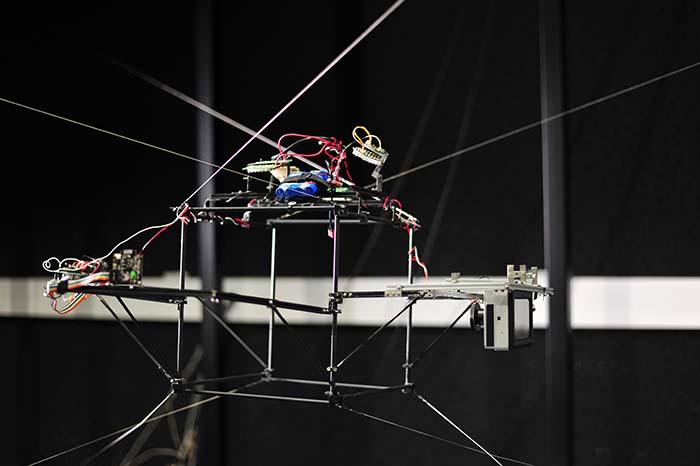
Les insectes volants ont développé des stratégies efficaces pour naviguer dans les environnements naturels. Mais l’étude expérimentale de ces stratégies est encore difficile en raison de la petite taille et de la grande vitesse de déplacement des insectes : seules sont possibles aujourd’hui les études d’insectes « attachés » ou en vol stationnaire. Des scientifiques du CNRS, de l’Université de Lorraine et d’Inrae* ont développé le premier robot guidé par des câbles, capable de suivre et d’interagir avec un insecte en vol totalement libre.
A l’aide de ce « laboratoire-sur-câbles », muni de caméras et d’un contrôleur qui minimise l’erreur de suivi entre la position de l’insecte et celle du robot, ils ont pu étudier le vol libre de papillons de nuit (Agrotis ipsilon, environ 2 cm de long) jusqu’à 3 mètres/seconde. Ces travaux ouvrent la possibilité de suivre d’autres insectes comme les drosophiles ou les moustiques et permettront de mieux comprendre les stratégies d’orientation de ces insectes, en réponse à des stimulations olfactives ou visuelles par exemple. Les résultats sont publiés le 10 juin et font la couverture de Science Robotics.
Plus d’informations : lire le communiqué du CNRS
*au Centre de recherche en automatique de Nancy (CNRS/Université de Lorraine), au Laboratoire lorrain de recherche en informatique et ses applications (CNRS/Université de Lorraine/Inria) et à l’Institut d’écologie et des sciences de l’environnement de Paris (CNRS/Sorbonne Université/UPEC/Inrae/IRD).
Voir la video du parcours du papillon
Voir la video du vol du papillon en 3D
(Copyright : Rémi Pannequin, Mélanie Jouaiti et Dominique Martinez).
Automatic tracking of free-flying insects using a cable-driven robot. Rémi Pannequin, Mélanie Jouaiti, Mohamed Boutayeb, Philippe Lucas et Dominique Martinez. Science Robotics, le 10 juin 2020. DOI : 10.1126/scirobotics.abb2890